
Serwa
Serwomechanizmy, często nazywane po prostu serwami, to urządzenia powszechnie wykorzystywane do precyzyjnego sterowania ruchem i pozycją komponentów w różnych projektach, od modelarstwa po robotykę i automatyzację.
Jak działa serwomechanizm? Budowa serwomechanizmu opiera się na połączeniu silnika prądu stałego i elektronicznego układu sterującego, który odbiera sygnały sterujące i przetwarza je, umożliwiając pełną kontrolę. W centralnym punkcie znajduje się wał serwomechanizmu, który precyzyjnie ustawia kąt wychylenia. Prędkość obrotowa może być regulowana – układ sterowania zapewnia płynne i dokładne ruchy.
 Kurs Arduino Dla Początkujących + Pakiet Sprzętu
Kurs Arduino Dla Początkujących + Pakiet Sprzętu
 Ogniwo LG M50L 21700 4900mAh 14.4A
Ogniwo LG M50L 21700 4900mAh 14.4A
 Inteligentny mini przełącznik do rolet WiFi Sonoff MINI-RBS (4 szt.)
Inteligentny mini przełącznik do rolet WiFi Sonoff MINI-RBS (4 szt.)
 Inteligentny mini przełącznik ZigBee Sonoff MINI-ZBRBS
Inteligentny mini przełącznik ZigBee Sonoff MINI-ZBRBS
Wyświetlanie wszystkich wyników: 11Posortowane według popularności




















Dla precyzji i dokładności
Serwomechanizmy znajdują zastosowanie tam, gdzie niezbędna jest wysoka precyzja ruchu — np. w modelach RC, dronach czy konstrukcjach robotycznych. Każde serwo umożliwia dokładne ustawienie kąta wychylenia, co pozwala na kontrolę pozycji i obrotów. Serwa są więc nieocenione w aplikacjach wymagających dokładności i niezawodności, np. w projektach DIY, gdy użytkownicy pragną osiągnąć wysoką precyzję bez skomplikowanych rozwiązań technicznych.
Serwa modelarskie — charakterystyka i zastosowanie
Serwa modelarskie to specjalistyczne urządzenia zaprojektowane z myślą o wykorzystaniu w modelarstwie oraz projektach wymagających precyzyjnego sterowania ruchem i pozycją komponentów w lekkich konstrukcjach. Każde serwo modelarskie wyposażone jest w silnik prądu stałego oraz zestaw przekładni, które przekształcają obroty silnika na dokładne ruchy wychyleniowe. Wbudowany elektroniczny układ sterujący odpowiada za precyzyjną regulację pozycji – umożliwia szybkie i precyzyjne wykonywanie ruchów w różnych płaszczyznach.
Serwa modelarskie stosuje się przede wszystkim w pojazdach zdalnie sterowanych (RC), takich jak samoloty, łodzie, drony i samochody, gdzie wymagana jest pełna kontrola nad kątem wychylenia i siłą. Takie serwomechanizmy sprawdzają się w projektach robotycznych, np. przy konstrukcji ramion robotycznych, manipulujących obiektami. Wybór odpowiedniego serwa modelarskiego zależy od kilku parametrów, m.in. momentu obrotowego, prędkości ruchu oraz kompatybilności z innymi elementami projektu.
Sterowniki serw — zarządzanie ruchem i precyzją
Sterowniki serw to elementy systemu kontroli serwomechanizmów, umożliwiające pełne zarządzanie ich ruchem i ustawieniem pozycji. Sterowniki serw odbierają sygnały sterujące, które pozwalają na dokładne ustawienie kąta i siły obrotu serwa modelarskiego. Działając w tandemie z silnikiem prądu stałego, sterownik umożliwia szybkie reagowanie na polecenia i natychmiastowe korygowanie pozycji.
Sterowniki serw zapewniają również możliwość programowania ruchu, dając użytkownikowi kontrolę nad szybkością oraz zakresem wychylenia serwa. Dzięki różnym funkcjom regulacji oraz możliwościom dopasowania do specyficznych potrzeb projektu, sterowniki serw ułatwiają integrację serwomechanizmów w projektach wymagających powtarzalnych, precyzyjnych ruchów.
Zastosowania serwomechanizmów i serw modelarskich w praktyce
Serwomechanizmy oraz serwa modelarskie znajdują szerokie zastosowanie w różnych dziedzinach – są niemalże nieocenionym narzędziem w projektach wymagających precyzyjnego sterowania ruchem. W modelarstwie RC serwa odpowiadają za kontrolę kierunku, lotu czy przyspieszenia. Dają pełną kontrolę nad modelami samolotów, dronów, łodzi i samochodów. W robotyce serwa wykorzystuje się do sterowania ramionami robotów, chwytakami oraz mechanizmami ruchu, aby precyzyjnie manipulować obiektami i wykonywać powtarzalne zadania.
Z kolei w automatyce przemysłowej serwomechanizmy stosowane są w systemach sterowania ruchem, np. w taśmach produkcyjnych czy robotach przemysłowych, aby osiągnąć wysoką precyzję i szybką reakcję na zmiany. W aplikacjach domowych serwa modelarskie mogą wspomagać działanie inteligentnych systemów – np. automatycznych zasuw czy regulowanych rolet.
Jak wybrać serwomechanizmy?
Wybór odpowiedniego serwomechanizmu lub sterownika serw może zaważyć na osiągnięciu optymalnych rezultatów w każdym projekcie – szczególnie tam, gdzie liczy się precyzyjne sterowanie. Pierwszym aspektem, na który należy zwrócić uwagę, jest maksymalny moment obrotowy serwa – od jego wartości zależy, jak dużą siłę serwo może zastosować, zwłaszcza w przypadku cięższych komponentów. Drugim istotnym parametrem jest prędkość reakcji, określająca, jak szybko serwo jest w stanie zmienić pozycję. W bardziej złożonych projektach ważne są też kompatybilność z różnymi sterownikami oraz możliwość programowania ustawień ruchu.
Przy wyborze sterownika serw warto rozważyć, jak duża liczba kanałów będzie potrzebna, aby móc sterować wieloma serwami jednocześnie, np. przy projektach wieloosiowych, takich jak roboty. Niemal równie ważna jest precyzja regulacji oferowana przez sterownik – niektóre modele pozwalają na dokładne ustawienia prędkości i zakresu wychylenia serwomechanizmu.
Ostateczny wybór powinien jednocześnie uwzględniać specyficzne wymagania projektu, a także poziom skomplikowania oraz budżet, by uzyskać najbardziej efektywne i precyzyjne rozwiązanie.

 Moduł przekaźnika SSR 1 kanał 5V Low trig
Moduł przekaźnika SSR 1 kanał 5V Low trig  Moduł Bluetooth HC-05
Moduł Bluetooth HC-05 
 Regulator obrotów silnika 2000W 230V
Regulator obrotów silnika 2000W 230V  Czujnik temperatury DS18B20 wodoodporny przewód 3m
Czujnik temperatury DS18B20 wodoodporny przewód 3m  Złącze śrubowe ARK 2-pin 5.08mm KF301-2P zielone
Złącze śrubowe ARK 2-pin 5.08mm KF301-2P zielone  Moduł zasilania do płytek stykowych MB102 3,3V-5V
Moduł zasilania do płytek stykowych MB102 3,3V-5V  Czujnik Poziomu Cieczy Indukcyjny XKC-Y25-V - Bezdotykowy i Wodoodporny 5–24 V, IP67
Czujnik Poziomu Cieczy Indukcyjny XKC-Y25-V - Bezdotykowy i Wodoodporny 5–24 V, IP67  Czytnik RFID RC522 13,56MHz SPI z kartą i brelokiem
Czytnik RFID RC522 13,56MHz SPI z kartą i brelokiem  Mikrofon z czujnikiem dźwięku KY037
Mikrofon z czujnikiem dźwięku KY037 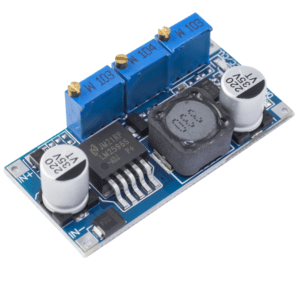 Przetwornica step-down LM2596 3A DC-DC z regulacją prądu
Przetwornica step-down LM2596 3A DC-DC z regulacją prądu  Koszyk na baterie 1 x AAA płaski z przewodem
Koszyk na baterie 1 x AAA płaski z przewodem 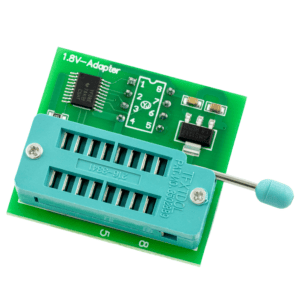 Adapter zasilania 1,8V z podstawką ZIF-16
Adapter zasilania 1,8V z podstawką ZIF-16 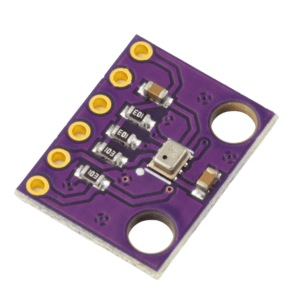 Czujnik ciśnienia i temperatury BMP280
Czujnik ciśnienia i temperatury BMP280  Czujnik temperatury i wilgotności DHT20
Czujnik temperatury i wilgotności DHT20  Moduł klawiatury 1x2-bit 2 przyciski
Moduł klawiatury 1x2-bit 2 przyciski 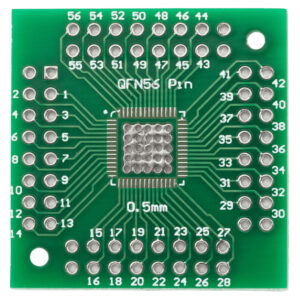 Adapter QFN56/QFN64 0.5 na DIP
Adapter QFN56/QFN64 0.5 na DIP  Programator USBASP dla AVR + taśma + adapter
Programator USBASP dla AVR + taśma + adapter  Adapter QFN24 0.5/QFN24 0.65 na DIP
Adapter QFN24 0.5/QFN24 0.65 na DIP  Moduł przekaźnika WiFi dla ESP-01/S ESP8266
Moduł przekaźnika WiFi dla ESP-01/S ESP8266  Moduł wyprowadzeń zasilacza ATX HU-M28W
Moduł wyprowadzeń zasilacza ATX HU-M28W  Wskaźnik naładowania akumulatora Li-Ion 1-8S niebieski
Wskaźnik naładowania akumulatora Li-Ion 1-8S niebieski  Kontroler RGB LED do ESP-01 / ESP-01S
Kontroler RGB LED do ESP-01 / ESP-01S  Czujnik temperatury i wilgotności DHT22 AM2302
Czujnik temperatury i wilgotności DHT22 AM2302  Obudowa hermetyczna do elektroniki - Zestaw IoT Kradex IOT.ZPSET1510.2 Transparentna
Obudowa hermetyczna do elektroniki - Zestaw IoT Kradex IOT.ZPSET1510.2 Transparentna  Enkoder obrotowy z przyciskiem
Enkoder obrotowy z przyciskiem 

 Wyświetlacz dotykowy TFT LCD 2,8" ST7789V 240x320px z czytnikiem SD SPI
Wyświetlacz dotykowy TFT LCD 2,8" ST7789V 240x320px z czytnikiem SD SPI 

 Zestaw startowy komponentów elektronicznych DIY do Arduino
Zestaw startowy komponentów elektronicznych DIY do Arduino  Uchwyt do akumulatorów 18650 podwójny
Uchwyt do akumulatorów 18650 podwójny  Przełącznik kołyskowy pojedynczy zielony (SPST) z podświetleniem
Przełącznik kołyskowy pojedynczy zielony (SPST) z podświetleniem  Izolator USB ADUM3160 izolacja galwaniczna
Izolator USB ADUM3160 izolacja galwaniczna  Wyświetlacz dotykowy TFT LCD 2,8" 240x320px z czytnikiem SD SPI
Wyświetlacz dotykowy TFT LCD 2,8" 240x320px z czytnikiem SD SPI  W5500-EVB-PICO WIZnet - płytka z mikrokontrolerem RP2040 i Ethernet W5500
W5500-EVB-PICO WIZnet - płytka z mikrokontrolerem RP2040 i Ethernet W5500  Wyświetlacz graficzny TFT IPS 0,96" 160x80px SPI
Wyświetlacz graficzny TFT IPS 0,96" 160x80px SPI  Czujnik temperatury DS18B20 wodoodporny przewód 1m
Czujnik temperatury DS18B20 wodoodporny przewód 1m  Zasilacz buforowy 12V ładowarka do akumulatorów 18650 z usb-c
Zasilacz buforowy 12V ładowarka do akumulatorów 18650 z usb-c  Moduł przekaźników SSR 2 kanały 5V Low trig
Moduł przekaźników SSR 2 kanały 5V Low trig  Wyświetlacz LCD 2x16 znaków zielony HD44780
Wyświetlacz LCD 2x16 znaków zielony HD44780  STM32 NUCLEO-H7S3L8 Nucleo-144 z STM32H7S3L8H6 Arm Cortex-M7
STM32 NUCLEO-H7S3L8 Nucleo-144 z STM32H7S3L8H6 Arm Cortex-M7 
 Wyświetlacz TFT LCD 2,2″ ILI9341 240x320px z czytnikiem SD SPI
Wyświetlacz TFT LCD 2,2″ ILI9341 240x320px z czytnikiem SD SPI  Moduł z 8 diodami LED niebieskie wspólna anoda
Moduł z 8 diodami LED niebieskie wspólna anoda  Przełącznik dźwigniowy dwupozycyjny (SPDT 3P)
Przełącznik dźwigniowy dwupozycyjny (SPDT 3P)  Wyświetlacz OLED 0,95" 96x64px SPI kolorowy
Wyświetlacz OLED 0,95" 96x64px SPI kolorowy  Przekaźnik czasowy 0-999 minut programowalny wielofunkcyjny 10-funkcji
Przekaźnik czasowy 0-999 minut programowalny wielofunkcyjny 10-funkcji  STM32 NUCLEO-F103RB Nucleo-64 z STM32F103RBT6 ARM Cortex-M3
STM32 NUCLEO-F103RB Nucleo-64 z STM32F103RBT6 ARM Cortex-M3  Okrągły Wyświetlacz TFT 0,71" GC9D01 160x160px SPI niebieski
Okrągły Wyświetlacz TFT 0,71" GC9D01 160x160px SPI niebieski  Enkoder obrotowy 15 mm
Enkoder obrotowy 15 mm  Obudowa z panelami bocznymi 50x130x149- Z4
Obudowa z panelami bocznymi 50x130x149- Z4  Wkrętarka akumulatorowa 3.6V 1300ma zestaw REBEL
Wkrętarka akumulatorowa 3.6V 1300ma zestaw REBEL