MCP2515 Moduł CAN-Bus: prosty sposób na CAN w Arduino

MCP2515 Moduł CAN-Bus: prosty sposób na CAN w Arduino
Moduł CAN-Bus MCP2515 to niezawodne i szeroko stosowane rozwiązanie pozwalające na integrację magistrali CAN z mikrokontrolerami, oraz z płytkami developerskimi takimi jak Arduino. Artykuł ten wyjaśni, czym jest moduł, jak działa transmisja danych przez protokół CAN oraz jak łatwo podłączyć i skonfigurować moduł CAN-Bus MCP2515, by wysyłać i odbierać sygnały w systemach automatyki czy aplikacjach motoryzacyjnych.
Spis treści
1. Czym jest moduł MCP2515 i jak działa?
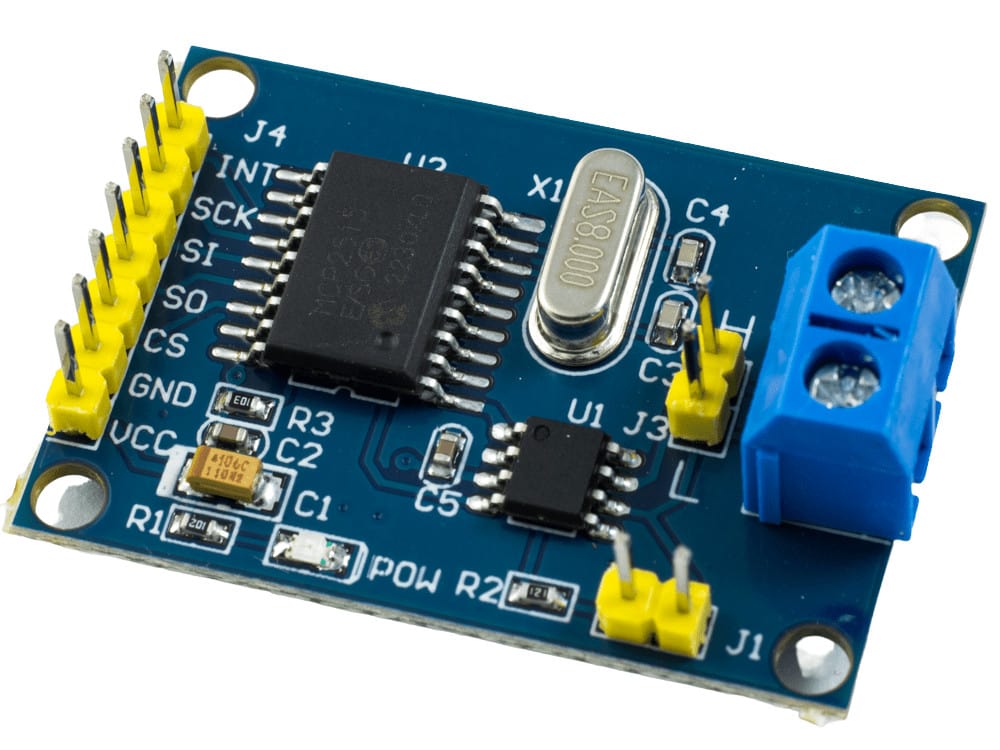
Moduł MCP2515 to kontroler CAN (controller area network) zaprojektowany z myślą o niezawodnej transmisji danymi w systemach motoryzacyjnych i przemysłowych. W jego wnętrzu znajduje się układ MCP2515 realizujący warstwę logiczną magistrali CAN, który komunikuje się z mikrokontrolerem poprzez interfejs SPI. Dzięki temu moduł może pełnić rolę oddzielnego węzła sieci CAN, odciążając CPU Arduino od zadań związanych z kodowaniem i dekodowaniem ramek. Dodatkowo MCP2515 posiada trzy wewnętrzne buforowane FIFO do przechowywania przychodzących i wychodzących wiadomości, co pozwala na płynne wysyłanie i odbieranie danymi nawet przy dużym natężeniu ruchu na magistrali.
W zestawie z kontrolerem znajduje się transceiver CAN TJA1050, który odpowiada za fizyczną warstwę magistrali CAN, przekształcając sygnały logiczne MCP2515 na różnicowe poziomy napięć CANH i CANL. Transceiver umożliwia pracę w szerokim zakresie napięciem od –2 V do +7 V oraz generuje odpowiedni prąd w stanie dominującym, co przekłada się na odporność na zakłócenia i zakłócenia elektromagnetyczne. Wbudowany rezystor 120 Ω pełni funkcję terminacji magistrali CAN, zapobiegając odbiciom sygnału na końcach kabla i gwarantując niezawodność systemu na długich odcinkach przewodu.
Konfiguracja modułu MCP2515 odbywa się poprzez zapis do rejestrów kontrolera przy użyciu interfejsu SPI, co pozwala na dostosowanie parametrów bitowych magistrali, takich jak prędkość (np. 125 kbps, 500 kbps) czy ustawienia filtrów i masek wiadomości. Dzięki temu można wybrać, które ramki będą odbierane przez dany węzeł, optymalizując obciążenie sieci i minimalizując czas przetwarzania przez Arduino. Takie podejście sprawia, że moduł CAN-Bus MCP2515 jest szeroko stosowany w projektach, gdzie wymagana jest stabilna komunikacja pomiędzy wieloma urządzeniami, a jednocześnie zależy nam na łatwym i szybkim wdrożeniu dzięki gotowemu interfejsowi SPI i standardowemu złączu.
2. Jak podłączyć moduł CAN-Bus MCP2515 do Arduino?
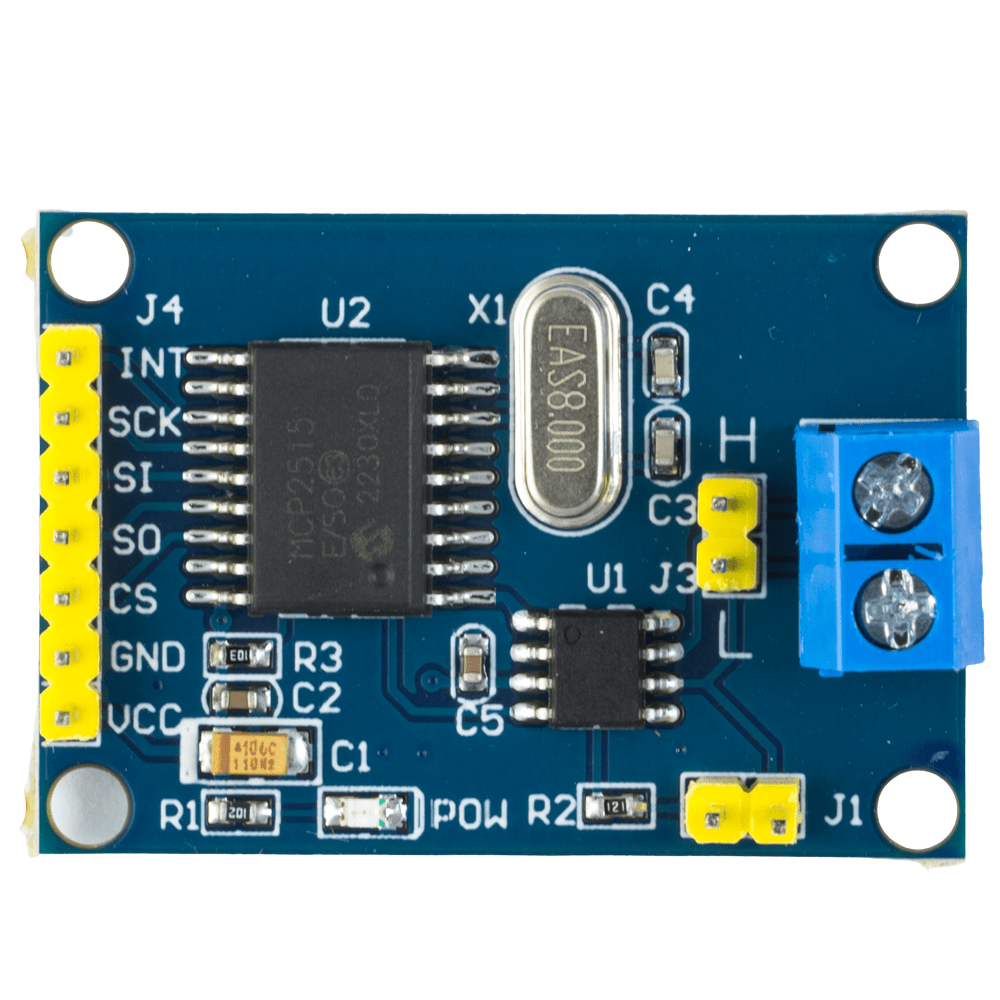
Podłączenie modułu CAN-Bus MCP2515 do płytki Arduino rozpoczynamy od zapewnienia prawidłowego zasilania. Pin VCC modułu podłączamy do wyjścia 5V na Arduino, a GND do masy ([GND]), co gwarantuje stabilne napięciem zasilania zarówno dla kontrolera MCP2515, jak i transceivera CAN TJA1050. Następnie łączymy linie interfejsu SPI pomiędzy mikrokontrolerem a modułem:
- MOSI → D11
- MISO → D12
- SCK → D13
- CS → D10 (lub inny wybrany pin, zależnie od konfiguracji w bibliotece)
Dzięki interfejsowi SPI Arduino może szybko wysyłać i odbierać ramki zgodne z protokołem CAN v2.0B, a gotowe złącze ułatwia montaż. Taki układ sprawia, że MCP2515 do Arduino staje się samodzielnym węzłem w sieci CAN, umożliwiającym efektywną komunikację i transmisję danych między wieloma mikrokontrolerami czy czujnikami.
Warstwa fizyczna magistrali wymaga podłączenia sygnałów CANH i CANL do magistrali CAN przy pomocy odpowiednio ekranowanych kabli, aby zminimalizować zakłócenia elektromagnetyczne w systemach automatyki i motoryzacyjnym otoczeniu. Na obu końcach przewodu powinna znaleźć się terminacja 120 Ω (wbudowany rezystor lub zewnętrzny), co znacząco poprawia niezawodność i jakość sygnału. Po zakończeniu połączeń warto sprawdzić ciągłość przewodów miernikiem i zweryfikować obecność napięcia CANH/CANL w stanie dominującym i recesywnym. Taka procedura gwarantuje, że moduł CAN-Bus MCP2515 zostanie poprawnie zintegrowany, a przesyłanie danych w magistrali CAN będzie stabilne i niezawodne.
3. Jak przebiega komunikacja przez magistralę CAN?
Magistrala CAN to dwuwartościowy system komunikacyjny pracujący w trybie wielomasztowym. Każdy węzeł może inicjować transmisję, a kontroler MCP2515 zarządza priorytetami ramek. Sygnał jest przesyłany różnicowo (CANH/CANL), co zwiększa odporność na zakłócenia i poprawia niezawodność.
Kiedy węzeł wysyła ramkę, inne urządzenia odczytują sygnał i potwierdzają odbiór. W przypadku kolizji ramki o niższym priorytecie są automatycznie wycofywane, a wyższy priorytet kontynuuje transmisję. Taki mechanizm zapewnia deterministyczne zachowanie, kluczowe w motoryzacji i systemach automatyki.
4. Jak skonfigurować kontroler w module MCP2515?
Konfiguracja kontrolera MCP2515 najczęściej odbywa się z wykorzystaniem dedykowanej biblioteki dla Arduino, np. MCP_CAN_lib. Po podłączeniu modułu CAN-Bus MCP2515 do płytki Arduino poprzez interfejs SPI, pierwszym krokiem jest określenie pinu CS oraz prędkości magistrali, np. 125 kbps lub 500 kbps, które muszą odpowiadać specyfice Twojej sieci CAN. W kodzie inicjalizacyjnym wywołujesz funkcję begin(CS_PIN, SPEED) (gdzie CS_PIN to numer pinu wybrany do sterowania modułem), co automatycznie ustawia wszystkie rejestry kontrolera pod kątem odpowiedniego transferu i transmisji danych. Dzięki temu moduł MCP2515 do Arduino staje się gotowy do komunikacji CAN, a dzięki gotowej bibliotece unikamy ręcznego ustawiania bitów synchronizacji czy konfiguracji masek filtrujących, co znacząco przyspiesza wdrożenie rozwiązania w systemach automatyki czy motoryzacji.
Jeśli potrzebujesz dokładniejszej regulacji parametrów magistrali CAN lub chcesz skonfigurować moduł w sposób niestandardowy, możesz ręcznie zapisać wartości do odpowiednich rejestrów MCP2515 przez interfejs SPI. Kluczowe rejestry to CNF1, CNF2 i CNF3, w których definiujesz napięciem próbkowania, długość bitu i segmenty synchronizacji ramki. Dodatkowo rejestry RXM0/1 oraz RXF0–RXF5 pozwalają zdefiniować maski i filtry, decydujące, które ramki będą odbierane przez dany węzeł. Taka ręczna konfiguracja umożliwia optymalizację transmisji danych w rozbudowanych sieciach CAN, gdzie zależy Ci na minimalizacji opóźnień i ograniczeniu ruchu do niezbędnych komunikatów protokołu CAN v2.0B.
5. Jakie są specyfikacja i parametry techniczne modułu?
Moduł CAN-Bus MCP2515 wykorzystuje protokół CAN v2.0B (standardowy i rozszerzony), co czyni go idealnym do zastosowań w wymagających sieciach CAN. Wewnętrzny kontroler MCP2515 komunikuje się z mikrokontrolerem poprzez interfejs SPI (do 10 MHz), co gwarantuje szybki i bezbłędny transfer danych. Napięcie zasilania modułu wynosi 5 V (±10%), a wbudowany rezystor 120 Ω służy jako terminacja magistrali CAN, podnosząc niezawodność transmisji na długich odcinkach kabla. Dzięki odseparowanemu zasilaniu analogowemu i cyfrowemu minimalizowane są zakłócenia sygnału, co ma kluczowe znaczenie w środowisku przemysłowym i motoryzacyjnym.
Dodatkowo moduł can-bus mcp2515 wyposażony jest w transceiver CAN TJA1050, który przekształca sygnały logiczne MCP2515 na różnicowe poziomy CANH/CANL, zapewniając odporność na zakłócenia elektromagnetyczne. Wyprowadzenia modułu (złącze pinowe) obejmują standardowe piny SPI (MOSI, MISO, SCK, CS), linie zasilania (VCC, GND) oraz sygnały CANH i CANL, co umożliwia łatwe podłączyć moduł do dowolnej płytki Arduino lub innego mikrokontrolera. W ramach diagnostyki kontroler CAN pozwala odczytywać kody błędów i monitorować stan magistrali, co przydaje się do szybkiego wykrywania problemów w rozległych sieciach CAN stosowanych w systemach automatyki czy samochodzie.
- Protokoły: CAN v2.0B (standard i rozszerzony)
- Interfejs: SPI do 10 MHz
- Zasilanie: 5 V ±10%
- Terminacja: wbudowany 120 Ω
- Diagnostyka: odczyt kodów błędów i stanów magistrali
- Zakres: do 40 m przy 500 kbps, do 1000 m przy 125 kbps
- Zastosowania: motoryzacja, przemysł, systemy automatyki
6. Co to jest transceiver i rola TJA1050?
Transceiver CAN TJA1050 to specjalizowany układ odpowiadający za fizyczną warstwę magistrali CAN. Jego zadaniem jest przekształcanie sygnałów logicznych generowanych przez kontroler MCP2515 na różnicowe poziomy napięć CANH i CANL, zgodnie z protokołem CAN v2.0B. TJA1050 pracuje w szerokim zakresie napięciem –2 V do +7 V, oferując wysoki prąd w stanach dominujących, co przekłada się na odporność na zakłócenia i gwarantuje niezawodność transmisji danych nawet w trudnych warunkach elektromagnetycznych.
Transceiver wyposażony jest we własne wewnętrzne zabezpieczenia, w tym ochronę przed zwarciem i przepięciami, co czyni go idealnym do zastosowań motoryzacyjnych i przemysłowych. Dzięki wbudowanym obwodom termicznym i oprogramowanym algorytmom detekcji błędów, TJA1050 automatycznie dostosowuje swoje parametry, utrzymując stabilny sygnał na magistrali CAN. W praktyce oznacza to, że nawet przy długich odcinkach kabla czy połączeniach wielowęzłowych, moduł CAN-Bus MCP2515 zachowuje wysoką jakość komunikacji i minimalizuje ryzyko utraty danych.
Podczas integracji modułu z płytką Arduino, transceiver łączy się z MCP2515 poprzez wspólne zasilanie 5V i masę, a fizyczne linie CANH/CANL wychodzą bezpośrednio do przewodów magistrali. Aby podłączyć moduł, wystarczy zwrócić uwagę na oznaczenia pinów na złączu i zastosować ekranowany kabel. Po inicjalizacji kontrolera przez interfejs SPI, za pomocą biblioteki MCP_CAN_lib, Arduino może wysyłać i odbierać ramki CAN bez potrzeby dodatkowej konfiguracji warstwy fizycznej — całość obsługuje transceiver TJA1050. Dzięki temu w systemach automatyki i w budowie węzłów CAN (np. czujników temperatury, czujników prędkości czy sterowników silników) integracja jest szybka i niezawodna.
7. Gdzie moduł CAN-Bus MCP2515 znajduje zastosowanie w motoryzacji i przemyśle?
Motoryzacja to jedno z głównych środowisk, w którym moduł CAN-Bus MCP2515 sprawdza się doskonale. Dzięki implementacji protokołu CAN v2.0B oraz wbudowanemu transceiverowi CAN TJA1050, moduł zapewnia niezawodność i odporność na zakłócenia, niezbędne w samochodzie. W elektronicznych układach sterowania silnikiem (ECU) kontroler MCP2515 umożliwia wysyłanie i odbieranie krytycznych danych o obrotach, ciśnieniu czy temperaturze, a poprzez interfejs SPI integruje się z głównymi jednostkami sterującymi pojazdu. Również w systemach diagnostyki OBD-II, gdzie odczytywane są kody błędów, moduł can-bus mcp2515 pozwala na szybkie odczytywać i przesyłać informacje do zewnętrznych urządzeń serwisowych.
W sektorze przemysłowym, moduł MCP2515 wykorzystywany jest w systemach automatyki oraz kontrolach procesów produkcyjnych. W sieciach rozproszonych, składających się z licznych węzłów, każdy wyposażony w czujnik temperatury, ciśnienia czy poziomu cieczy, moduł łączy się z nadrzędnym sterownikiem PLC poprzez magistralę CAN, co zapewnia deterministyczną transmisję danych na duże odległości (do 40 m przy 500 kbps lub nawet 1000 m przy 125 kbps). Dzięki wbudowanemu rezystorowi 120 Ω i możliwości konfiguracji masek filtrujących, redukuje się niepotrzebny ruch w kanale, co optymalizuje transfer i zwiększa stabilność całego systemu.
Poza motoryzacją i przemysłem, moduł can-bus z MCP2515 do Arduino znajduje zastosowanie w projektach związanych z inteligentnymi budynkami oraz robotyką. W robotach mobilnych i autonomicznych pojazdach AGV, gdzie wiele mikrokontrolerów musi wymieniać się danymi w czasie rzeczywistym, moduł gwarantuje szybką i bezpieczną komunikację pomiędzy napędami, czujnikami odległości czy kamerami. Dzięki prostemu podłączeniu modułu i łatwej konfiguracji w środowisku Arduino, inżynierowie mogą szybko prototypować rozwiązania IoT, monitorować stany zasilania akumulatorów czy sterować urządzeniami wykonawczymi w rozległych sieciach CAN.
8. Jakie biblioteki wspierają CAN MCP2515 na Arduino?
Do obsługi modułu MCP2515 na Arduino dostępne są m.in.:
- MCP_CAN_lib – oficjalna biblioteka z funkcjami inicjalizacji, wysyłki i odbioru.
- CAN_BUS_Shield – rozszerzenie oferujące obsługę dodatkowych filtrów i masek.
Biblioteki te wykorzystują interfejs SPI i pozwalają szybko rozpocząć pracę bez głębokiej znajomości protokołu. W dokumentacji znajdziemy przykłady, jak wysyłać i odbierać wiadomości oraz jak sprawdzić stan magistrali.
9. Jak zoptymalizować przesyłanie danych w CAN-Bus?
Aby zmaksymalizować wydajność transmisji danych w magistrali CAN, warto przede wszystkim dostosować prędkość magistrali do długości kabla. Dla odcinków powyżej 40 m zaleca się ustawić 125 kbps, a dla krótszych – nawet 500 kbps lub więcej, jeśli specyfikacja sieci na to pozwala. Takie podejście minimalizuje ryzyko odbić sygnału i obniża wpływ tłumienia napięciem, co bezpośrednio przekłada się na stabilność komunikacji i redukcję opóźnień w systemach automatyki czy motoryzacyjnych aplikacjach opartych na modułach MCP2515.
Drugim krokiem jest zastosowanie odpowiednio ekranowanych kabli i właściwej terminacji magistrali. Wbudowany lub zewnętrzny rezystor 120 Ω na końcach linii CANH/CANL eliminuje odbicia sygnału, podnosząc odporność na zakłócenia elektromagnetyczne. Ograniczenie liczby aktywnie transmitujących węzłów w danym czasie zmniejsza prawdopodobieństwo kolizji ramek, co jest kluczowe zwłaszcza w rozbudowanych instalacjach przemysłowych, gdzie każdy węzeł może pełnić rolę czujnika lub sterownika.
Na koniec warto skonfigurować filtry i maski w modułach CAN-Bus MCP2515 tak, aby odbierać jedynie niezbędne ramki. Dzięki temu mikrokontroler (np. Arduino) nie będzie obciążony przetwarzaniem niepotrzebnych komunikatów, a transfer pomiędzy urządzeniami będzie szybszy i bardziej przewidywalny. Wykorzystanie odpowiedniej biblioteki (np. MCP_CAN_lib) pozwala w kilku linijkach kodu ustawić filtry, priorytety ramek oraz wyciszyć zbędne identyfikatory, co zoptymalizuje cały system transmisji danych przez interfejs SPI.
10. Gdzie kupić moduł CAN-Bus MCP2515?
Najlepszym miejscem jest msalamon. W ofercie znajdziesz zarówno moduł can-bus MCP2515 w różnych wariantach (z wbudowanym transceiverem TJA1050 i terminacją 120 Ω), jak i zestawy zawierające dokumentację montażu oraz przykłady kodu do mcp2515 do Arduino. Każdy moduł jest testowany pod kątem poprawnej transmisji danych przez interfejs SPI oraz zgodności z zasilaniem 5 V, co gwarantuje bezproblemową integrację w Twoim systemie.
Zakupy na msalamon to także:
- Gwarancja i wsparcie techniczne – w razie problemów możesz skorzystać z fachowej pomocy przy konfiguracji i podłączeniu modułu.
- Szybka wysyłka – zarówno dla projektów hobbystycznych, jak i zastosowań przemysłowych, moduły trafiają do Ciebie w ciągu 24–48 h.
- Możliwość zwrotu lub wymiany – jeśli chcesz sprawdzić inny wariant lub potrzebujesz dodatkowych elementów (np. przewodów ekranowanych czy złącz), masz pewność elastycznej obsługi.
Sklep msalamon to sprawdzone miejsce na zakup modułu CAN-Bus MCP2515 dla wszystkich, którzy chcą szybko i bezpiecznie przesyłać dane w sieci CAN, zarówno w projektach motoryzacyjnych, jak i automatyce przemysłowej.
Podsumowanie – co warto zapamiętać?
Sklep msalamon.pl to sprawdzone źródło oryginalnych modułów MCP2515 z gwarancją, wsparciem technicznym i szybką wysyłką.
Moduł CAN-Bus MCP2515 to wydajny kontroler CAN, który dzięki interfejsowi SPI odciąża Arduino od obsługi protokołu CAN v2.0B.
Wbudowany transceiver TJA1050 zapewnia fizyczną warstwę magistrali, przekształcając sygnały logiczne na różnicowe poziomy CANH/CANL.
Poprawna terminacja (120 Ω) oraz zastosowanie ekranowanych kabli gwarantują niezawodność i odporność na zakłócenia elektromagnetyczne.
Konfigurację prędkości magistrali (np. 125 kbps lub 500 kbps) i filtrów ramek realizuje się łatwo za pomocą bibliotek (np. MCP_CAN_lib) lub ręcznie przez rejestry CNF1–CNF3.
Moduł can-bus mcp2515 znajduje zastosowanie w motoryzacji (ECU, OBD-II) oraz w systemach automatyki przemysłowej, gdzie wymagana jest deterministyczna transmisja danych na długich odcinkach.
Do wysyłki i odbioru danych w sieci CAN wystarczy kilka linii: MOSI, MISO, SCK, CS oraz linie zasilania (5 V, GND).

Prezentowaną w artykule elektronikę znajdziesz oczywiście w naszym sklepie 👉 sklep.msalamon.pl 👈Zapraszamy również na nasze social media, gdzie na bieżąco informujemy o nowych produktach oraz o najciekawszych promocjach 😎👇